腿足具身智能的人形机器人
浏览量:102
清华大学自动化系研究员、机器人控制实验室主任、清华大学无人系统中心类脑机器人中心主任,北京加速进化科技有限公司联合创始人、首席科学家赵明国在人形机器人领域,提出了虚拟斜坡行走方法、广义模型预测控制、全身控制等方法,研究成果获得 RoboCup 人形组亚军等多项国际奖项。在类脑计算领域,利用神经形态技术创建了高性能、高能效的机器人控制系统,成果发表于2018年 Nature 封面,获得 2019 年度中国科学十大进展及“科技创新 2030”计划的资助。
加速进化人形机器人产品Booster T1,专为开发者而设计,主打特点是“轻巧灵活、皮实耐摔”。具有超大活动范围和高度灵活,不仅能精准复现人类的绝大部分动作,还能完成许多人类难以企及的高难度姿态。
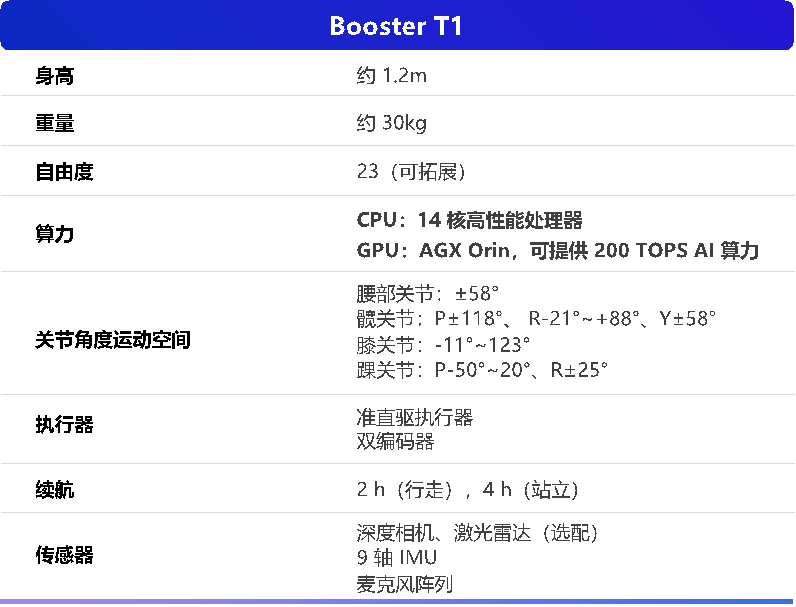
机器人支持全向行走、摔倒爬起、踢球、行走抗扰等运动能力。产品采用准直驱力控,支持多类型运控算法;算力可配置,支持多种感知传感器;拥有感知和定位功能,不仅能理解并执行人类的语音指令,还能精准选择和操控不同颜色的小球;开发者友好,为开发者提供高效易用的开发工具。产品旨在成为“具身智能”的最佳载体。
联系方式
CONTACT US
科创部:13801079858
邮箱:cgzh@tsinghua.edu.cn
办公室:010-62771700
地址:北京清华大学学研大厦